平衡二叉树
leetcode第110题(简单)
原链接 https://leetcode-cn.com/problems/balanced-binary-tree/
题目描述
给定一个二叉树,判断它是否是高度平衡的二叉树。
本题中,一棵高度平衡二叉树定义为:
一个二叉树每个节点 的左右两个子树的高度差的绝对值不超过 1 。
示例1
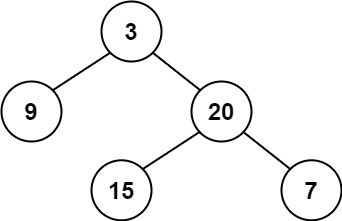
输入:root = [3,9,20,null,null,15,7] ,输出:true
示例2
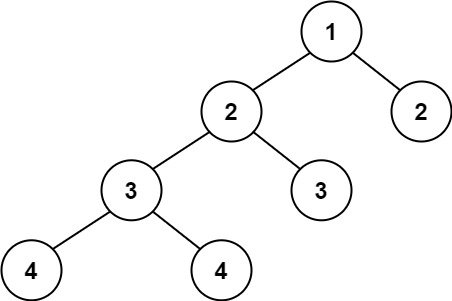
输入:root = [1,2,2,3,3,null,null,4,4],输出:false
解题思路
递归,分治。
递归遍历二叉树所有节点,从叶子节点开始向上判断每个节点所在的子树,是否是平衡二叉树。直到树的根节点为平衡二叉树结束。
代码(java)
/**
* Definition for a binary tree node.
* public class TreeNode {
* int val;
* TreeNode left;
* TreeNode right;
* TreeNode() {}
* TreeNode(int val) { this.val = val; }
* TreeNode(int val, TreeNode left, TreeNode right) {
* this.val = val;
* this.left = left;
* this.right = right;
* }
* }
*/
class Solution {
public boolean isBalanced(TreeNode root) {
dfs(root);
return b;
}
boolean b=true;
public int dfs(TreeNode root){
if(root==null){
return 0;
}else{
int left=dfs(root.left);
if(!b){
return 0;
}
int right=dfs(root.right);
//System.out.println(Math.abs(left-right));
if(Math.abs(left-right)<=1){
return (left>right?left:right)+1;
}else{
b=false;
return 0;
}
}
}
}
fixed
没有一个冬天不可逾越,没有一个春天不会来临。最慢的步伐不是跬步,而是徘徊,最快的脚步不是冲刺,而是坚持。